Cele Celem projektu było opracowanie biblioteki DeviceConfigJSON, służącej do konfiguracji urządzeń, mikrokontrolerów (w szczególności ESP32) za pomocą formatu JSON. W artykule zostaną przedstawione kluczowe cechy biblioteki, opis jej funkcjonalności oraz sposób implementacji przy użyciu przykładowego kodu. Należy zauważyć, że po zaimplementowaniu w swoim urządzeniu tej biblioteki istnieją gotowe aplikacje umożliwiające wykonanie konfiguracji urządzenia. Dla przykładu… Continue reading
Wgrywanie pliku BIN do ESP w Linux Ubuntu

Aby wgrać plik bin na ESP8266 w systemie operacyjnym Linux Ubuntu (również Debian), należy użyć narzędzia do wgrywania oprogramowania zwanego “esptool.py”. Możesz zainstalować esptool w systemie wykonując następujące kroki: 1. Otwórz terminal i zainstaluj Pythona, jeśli jeszcze go nie masz, wykonując polecenie: sudo apt-get install python3 2. Zainstaluj narzędzie esptool.py, wykonując polecenie: sudo apt-get install… Continue reading
Obudowa dla ESP8266 Heltec
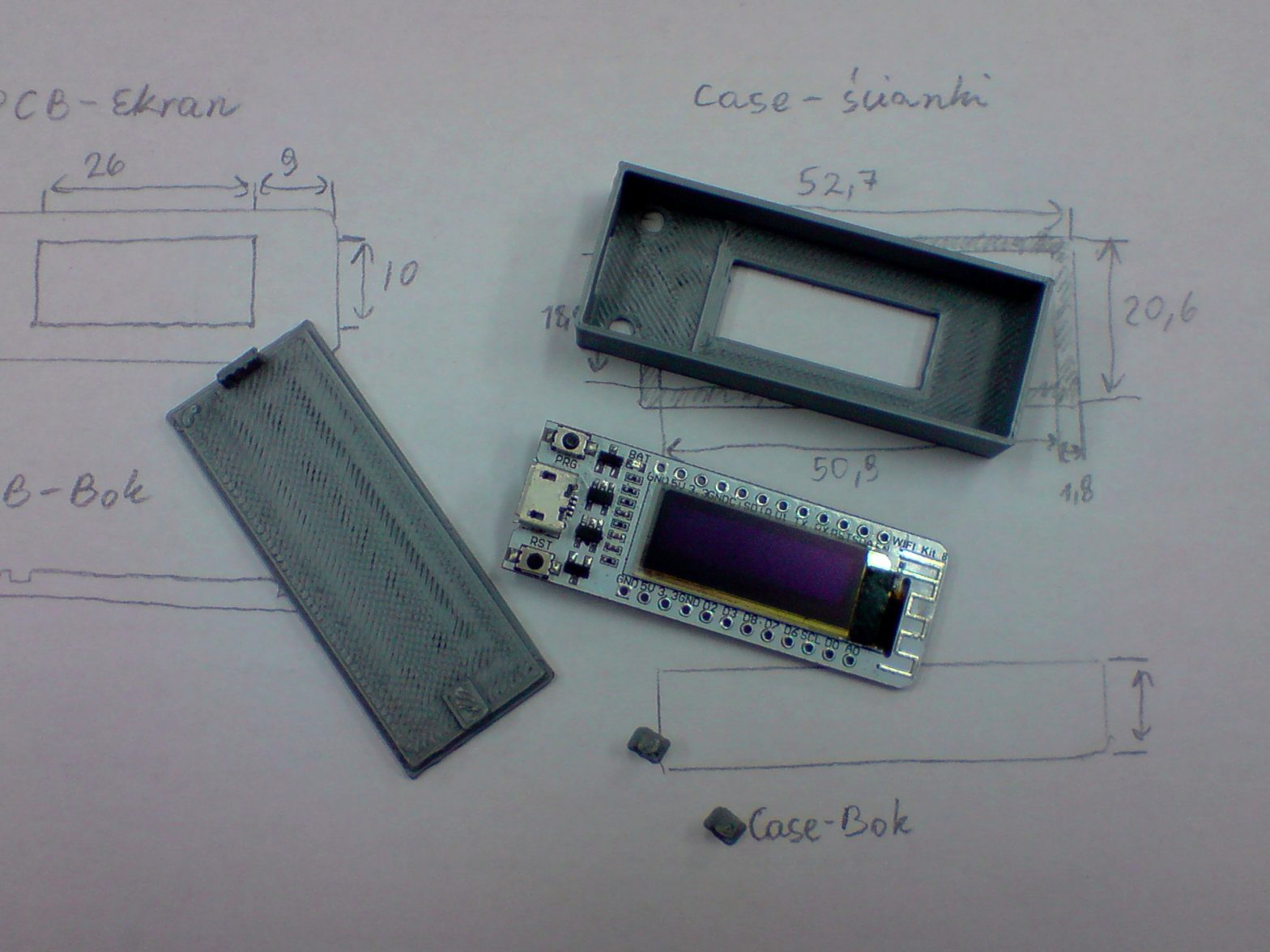
Obudowa zaprojektowana została w programie FreeCAD dla układu HTIT-W8266 firmy Heltec wyposażonego w ekran OLED i ESP8266. Na bocznej ściance znajduje się miejsce dla gniazda USB, obok wyświetlacza umieszczono przyciski “PRG” oraz “RST”. Projekt zawiera gotowe pliki dla drukarki 3D w formacie obj oraz gcode (Prusa i3 MK3). Pliki projektu esp_oled_case.obj – główna część obudowy… Continue reading
ESP32 Web Cam
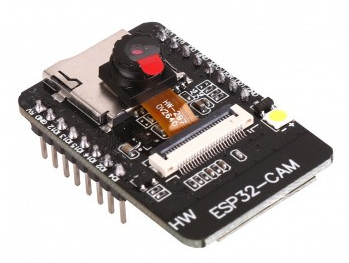
Cele Celem projektu jest opracowanie rozwiązania udostępniającego obraz z kamery w formie pojedynczej klatki w formacie JPG. Dostęp do kamery realizowany ma być za pośrednictwem sieci WiFi i protokołu HTTP. Podzespoły urządzenia Urządzenie oparte jest o moduł którego sercem jest ESP32-S. Ten bogaty w peryferia układ posiada między innymi WiFi 802.11 b/g/n, Bluetooth v4.2 BR/EDR BLE,… Continue reading
Sterowanie Xiaomi Air Purifier 2S skryptami w Python

Wstęp Xiaomi Air Purifier jest domowym oczyszczaczem powietrza eliminującym z pomieszczenia (zależnie od zastosowanego filtra) pyły PM2,5 a także formaldehyd, pyłki roślin i inne. Wyposażony jest w bezprzewodową kartę sieciową łączącą się z domową siecią WiFi. Dostarczona przez producenta aplikacja Mi Home umożliwia sterowanie urządzeniami tego producenta (kamery, oczyszczacze powietrza, autonomiczne odkurzacze i żarówki) ze smartfona. Artykuł… Continue reading
InstAdd – aplikacja do obsługi Instagrama w Debian/Ubuntu
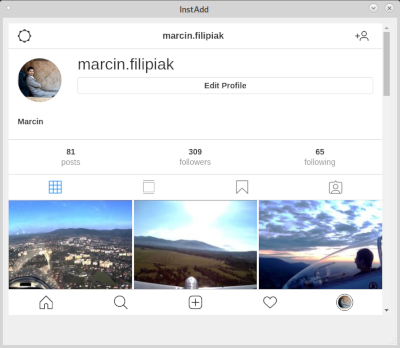
English summary InstAdd is unofficial application for Instagram where you can add pics from you PC. Application is available in DEB for Linux Debian or Ubuntu. Informacje Dotychczas do wgrywania zdjęć do serwisu Instagram z komputera stacjonarnego używałem aplikacji Ramme, jednak po aktualizacji Linux Debian do wersji 10 przestała ona działać. Problem okazał się na dla… Continue reading
MD5checker
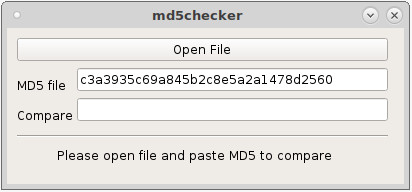
Informacje MD5 jest algorytmem kryptograficznym będącym funkcją skrótu. Z dowolnej długości ciągu danych generuje 128 bitowy skrót który może informować o integralności danych. Wiele repozytoriów podaje MD5 plików. Po ich pobraniu, by potwierdzić, że nie doszło do ich zmiany w trakcie przesyłu należy wygenerować skrót MD5 i sprawdzić czy jest identyczny z oczekiwanym. Mimo iż… Continue reading
Projekt PCB i wizualizacja w DipTrace
Film przedstawiający proces projektowania PCB w programie DipTrace i wizualizację układu.
Instalacja PlatformIO w systemie Debian/Ubuntu

Edytor Atom jest desktopowym edytorem kodów źródłowych, udostępniony na licencji MIT. Bazuje on na przeglądarce Chromium i pozwala na integrację z repozytoriami Git. Istnieje wiele wtyczek napisanych w JavaScript które poszerzają jego możliwości. Jedną z nich jest PlatformIO – wtyczka umożliwiająca pisanie programów dla Arduino, ESP oraz STM, kompilację i wgrywanie. Po zalogowaniu jako root… Continue reading
Przygotowanie projektu dla PCBWay
Wstęp W artykule został omówiony sposób przygotowania projektu PCB stworzonego w DipTrace do produkcji przez chińską fabrykę PCBWay. 1. Rejestracja w PCBWay Po zainstalowaniu pakietu programów DipTrace i stworzeniu projektu (zobacz: “Projekt PCB i wizualizacja“) można przystąpić do założenia konta w PCBWay. Jest to nie tylko strona fabryki ale i mały serwis społecznościowy w którym zarejestrowane… Continue reading